11月25日,靈寶CASBOT攜全尺寸雙足人形機器人CASBOT 02與輪式具身智能機器人CASBOT W1出席國際銅業協會(ICA)在上海舉辦的“綠色創新,銅繪未來”專題論壇,并圍繞《機器人在礦山中的新應用》進行了主題分享,與來自全球銅產業鏈的礦企、裝備廠商與科研機構共同探討智慧礦山的發展方向。本次論壇聚焦銅產業在能源轉型、綠色發展及智能化升級中的關鍵議題,為具身智能技術與礦山行業的深度連接提供了一個直觀窗口,也讓機器人技術在礦山落地的產業化價值被更多決策層清晰關注。
作為全球銅工業領域最具影響力的頂級盛會之一,國際銅業協會年度論壇長期匯聚來自世界主要銅礦企業、冶煉集團、加工制造商、裝備供應商及科研機構的核心代表,是洞察國際銅產業趨勢、前沿技術和投資布局的關鍵平臺。在銅需求因能源轉型與綠色經濟而持續增長的背景下,今年論壇尤為關注礦山智能化與安全性提升,也為具身智能在高危工況中的應用探索提供了更具國際視野的展示舞臺。

當前,全球銅需求在能源轉型、電動交通、儲能建設與數據中心擴容的推動下持續增長,銅作為高導電、高耐腐蝕且可持續循環的重要基礎材料,其戰略價值進一步凸顯。然而,在銅礦生產端,行業正在邁入深部化與極端化的雙重階段:井下溫度長期高企、濕度超過90%,粉塵濃度大、光照條件極不穩定,巷道狹窄、坡度陡峭、地表松散,使爆破、撬毛、鉆孔、支護等工序存在更高危險度與不可預測性。隨著礦區向千米深井延伸,傳統勞動方式難以兼顧安全、高效與可持續性,開采環境對人的生理和心理負荷都在迅速提升。
在這樣的背景下,國家政策連續強調建設“少人化、無人化、本質安全化”的智慧礦山體系,推動從機械化替代升級到智能化執行。行業普遍認為,傳統自動化設備難以滿足復雜環境變化和非結構化任務需求,而具身智能機器人憑借“移動能力 + 感知能力 + 操作能力 + 自主決策能力”的組合,具備適應極端空間、復雜工序與實時變化的潛力,是未來礦山作業體系必須布局的關鍵技術方向。
在論壇活動現場中,CASBOT 02通過迎賓、行走與人機互動向現場嘉賓呈現了人形機器人在真實空間中的穩定性、動態平衡能力與自然交互表現。雖然展示場景相對輕量,但其體現的步態控制、環境理解和即時響應能力,是未來巡檢、安全輔助與礦區外圍任務的基礎模塊。這些能力不僅決定了機器人在低結構化環境下的生存性,也為其進入更復雜空間、執行更高難度任務奠定了能力底座。

此外,在11月27日晚舉行的2025亞洲銅業周重要活動——“2025亞洲銅晚宴”上,CASBOT 02也作為迎賓機器人正式亮相。本次晚宴規模超過2300人,是亞洲范圍內銅產業最重要的行業交流活動之一,匯聚了來自全球礦業、冶煉、貿易與金融等領域的核心參與者。CASBOT 02在現場完成了迎賓互動、基本溝通與通行引導等展示,進一步呈現了具身智能機器人在大型活動、公用場景和產業溝通場合中的服務能力,也讓行業對機器人在礦業外圍空間的應用方式有了更直觀認知。

CASBOT W1在現場執行了模擬銅礦井下“裝藥炸礦”這一典型高危工序的演示任務。裝藥作為銅礦爆破開采環節的關鍵步驟,需要在狹窄巷道、破碎巖體、粉塵彌散及光照不均的環境中完成精準裝填、定點放置與穩定撤離,對作業人員和設備的安全性提出極高要求。CASBOT W1在模擬工況中完成了裝填、定位到放置的連續動作,動作連貫、控制穩定,展現出其在銅礦爆破準備工序中的替代潛力。這一演示不僅驗證了CASBOT W1在典型礦山高危節點的可執行能力,也體現了具身智能機器人在銅礦“少人化、無人化”進程中的實際價值。隨著深部銅礦開采對安全性與連續性的要求不斷提升,具備環境理解、抗擾執行和精細操作能力的機器人,有望承擔更多如爆破準備、巷道清理、設備協助等工序任務。CASBOT W1的底層能力同樣具備良好的跨場景遷移潛力,未來可拓展至井下巡檢、能源運維、隧道工程與城市應急救援等高復雜度環境,為銅礦智能化升級提供堅實的技術支撐。

在《機器人在礦山中的新應用》主題分享中,靈寶CASBOT從銅礦實際工序出發,進一步擴展了具身智能機器人在未來礦山體系中的技術路徑。靈寶CASBOT提出,礦山的核心難題并不僅在于危險性本身,而在于工序高度“非結構化”:不同礦體結構、碎石堆積形態、支護方式、光照條件和人員經驗差異,使得任務無法完全標準化。大量井下工序都需要即時判斷、多步操作迭代與復雜環境適應,傳統自動化設備只能覆蓋固定流程,而無法應對這些的不確定性。
為了進入這些工序,具身智能機器人必須跨越三項關鍵技術門檻。首先是環境理解能力,它通過視覺、激光雷達、IMU、力覺等多模態融合,確保在粉塵、高濕度、低光照、反光礦壁等極端條件下依然保持對環境的穩定識別。其次是復雜地形與動態干擾下的運動與操作能力,要求機器人在坑洼、濕滑、破碎地面以及狹窄空間中仍具備穩健執行力,并能在意外擾動下迅速恢復。其三是泛化與恢復能力,使機器人能夠通過示范學習、經驗遷移及環境適配,面對變化時不依賴預設流程,而能夠自主調整任務策略。
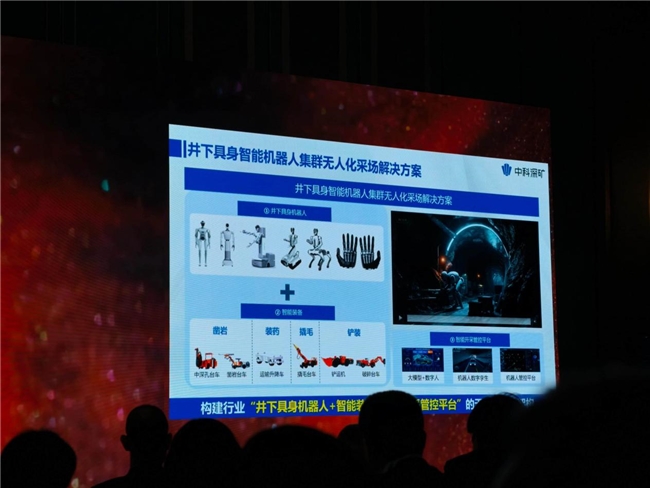
在分享中提出的“無人化采場三層協同體系”——機器人承擔非結構化任務,智能裝備執行周期性機械工序,平臺系統負責調度和安全管理——為礦山從局部自動化走向系統無人化提供了可操作的路徑框架,也為行業提供了未來部署的整體視角。
通過本次在ICA論壇的展示與交流,靈寶CASBOT全面呈現了具身智能機器人在銅礦工況中的能力基礎與未來潛力。從替代高危節點工序到降低人員暴露風險,從提升任務連續性到實現巡檢與執行一體化,具身智能正在成為銅礦場景智能化升級的重要技術支撐。CASBOT 02與W1的現場能力演示與系統化分享,使行業對“機器人如何真正進入礦山”這一關鍵命題擁有了更具象、更現實的認知。
未來,靈寶CASBOT將繼續與礦企、科研機構與裝備廠商深化合作,在示范礦區建設、工序智能替代驗證、智能調度體系構建、極端工況操作和安全協作體系等關鍵方向推進落地,共同推動銅礦行業邁向更安全、更高效、更綠色的智能化新階段。